- TOP
- 卒展特集
- 工学部 デザイン学科/工学研究科 情報・デザイン工学専攻 第35回「卒業・修了展」
- ラチェット機構を用いた杖の小型化および機能分析
ラチェット機構を用いた杖の小型化および機能分析
井原雄希/工学部 デザイン学科 ユーザエクスペリエンスデザイン研究室



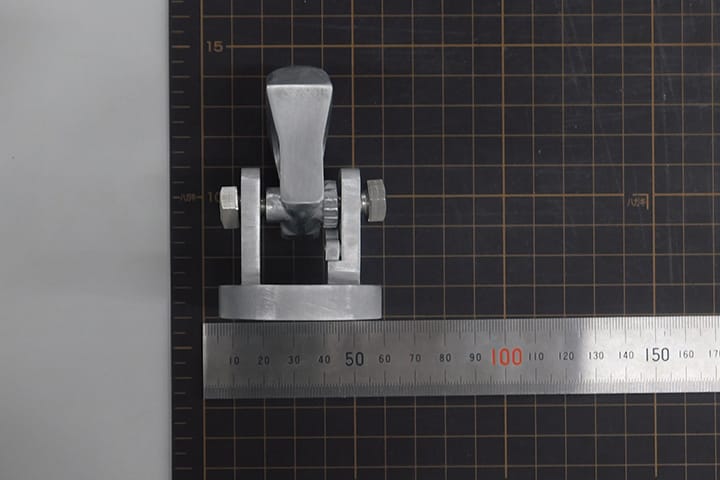
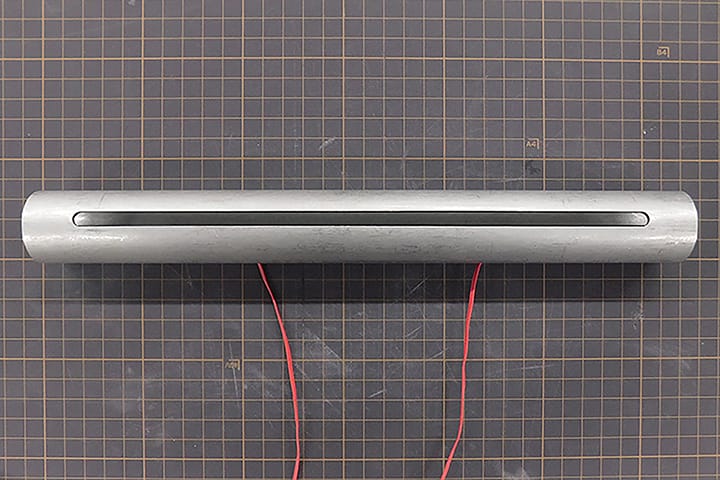
一本杖は杖先の一点で体を支えるため,多脚杖などと比較すると支持基底面が狭く扱い方次第で安定性の低下につながる恐れがある.そこでラチェット機構をおこなったが,杖先自体が大きく重量もあるため日常生活で利用するためには小型化することが喫緊の課題とされていた.そこで本研究では,先行研究で制作した杖先の小型化および構造の再検討と素材の変更をおこなった.制作材料にはアルミニウムを用い,造形には金属出力可能な3Dプリンタを用いた.出力した杖先を用いて,杖に3軸力覚センサや筋電センサを取り付け歩行時の機能分析をおこなった.結果,杖に加わる荷重が約12 N軽減や,アンケートより利便性の向上が確認できた.