- TOP
- 卒展特集
- 拓殖大学 工学部 デザイン学科/工学研究科 情報・デザイン工学専攻 卒業・修了展
- 把持形態のリアルタイムフィードバックとその精度向上に関する研究
把持形態のリアルタイムフィードバックとその精度向上に関する研究
與那覇拓真/工学部 デザイン学科
筋電義手は操作の際、誤作動が起きやすいことが判明しており、筋電義手のメリットを最大限に発揮することが難しい。本研究では、義手にAI搭載による問題解決の手法を提案する。
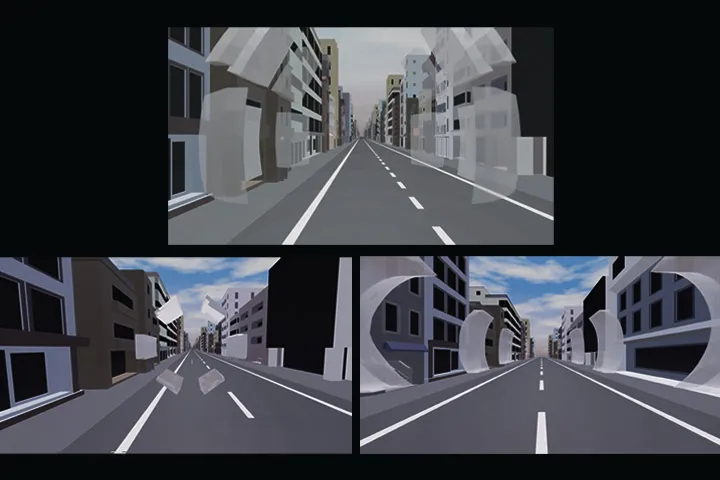
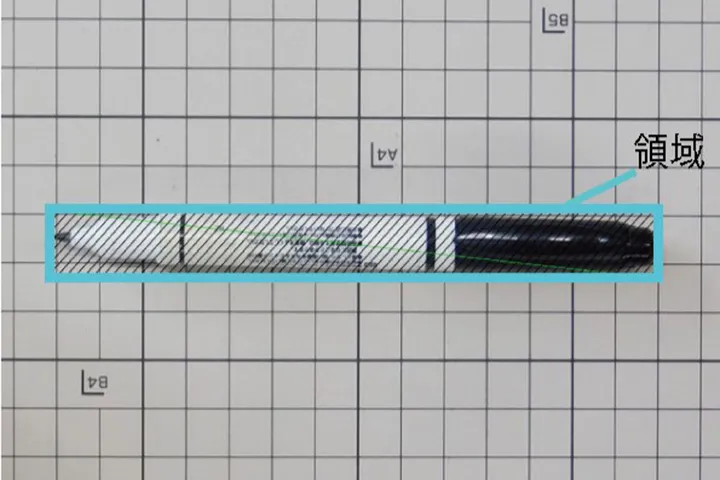
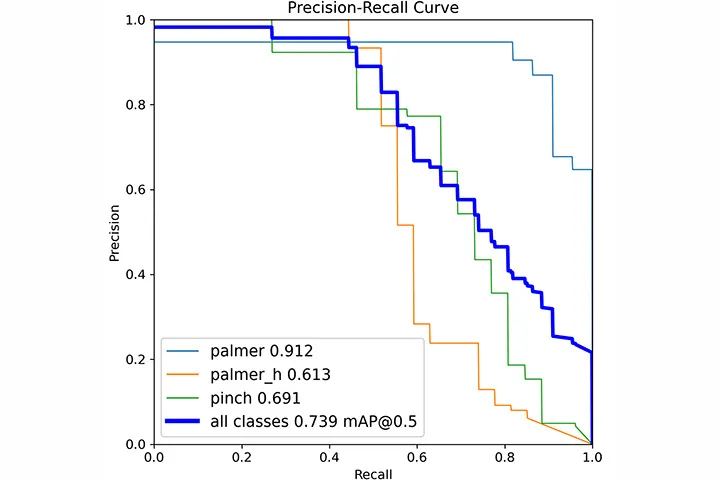
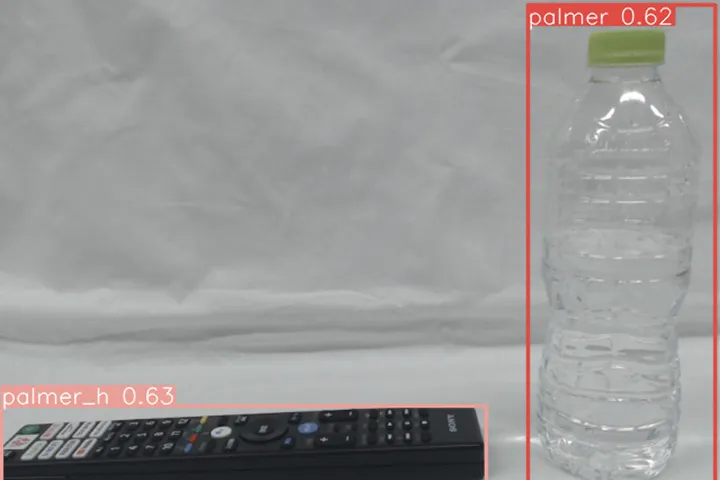
AIにはフィードバックの速さを重視したアルゴリズム「YOLO」を選択し、把持形態には垂直把持、水平把持、つまむの3種類を設定したAIモデルを構築した。
実験の結果、全体的な精度が先行研究より約20%程度低下したが、これまで実行不可であったリアルタイムかつ複数の物体の認識をおこなえた。
今後は分類精度を100%に近づけるために機械学習を何度も繰り返すことや、他の画像認識の手法をおこなうなど、モデルの学習に最適な設定を導き出す必要がある。