- TOP
- 卒展特集
- 拓殖大学 工学部 デザイン学科/工学研究科 情報・デザイン工学専攻 卒業・修了展
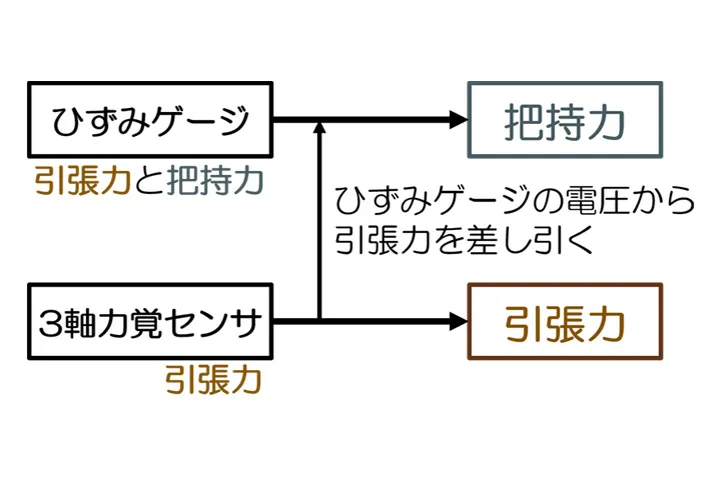
- 階段用手すりに作用する握力と引張力に分割計測可能なアルゴリズムの開発
階段用手すりに作用する握力と引張力に分割計測可能なアルゴリズムの開発
長田楽瑛莉/工学部 デザイン学科
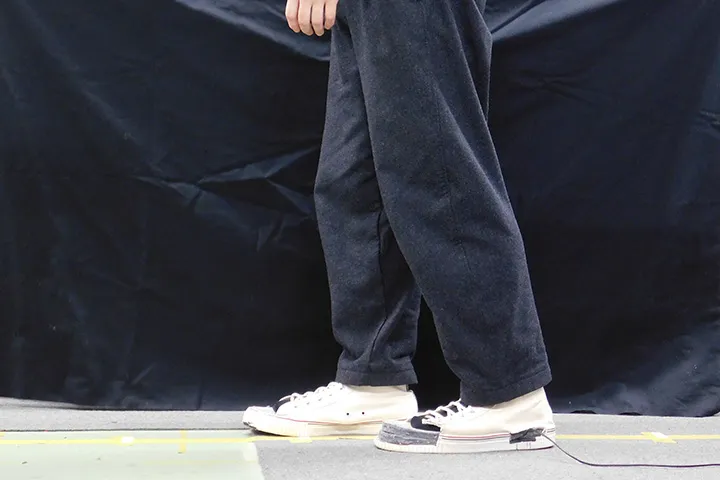
高齢化が進む日本では、公共施設のバリアフリー化がより一層進んでいる。手すりには運動機能向上のほか、行動範囲の拡大が期待できる。
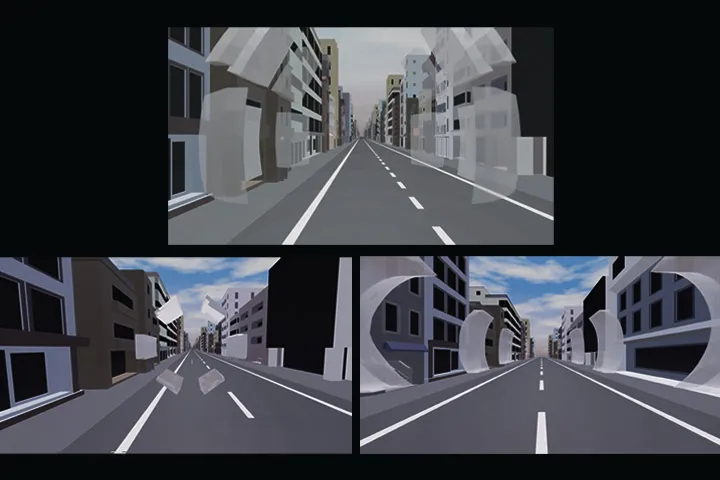
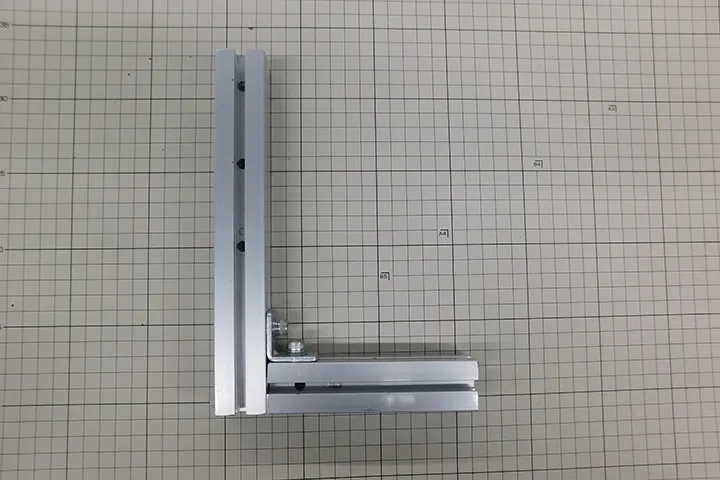
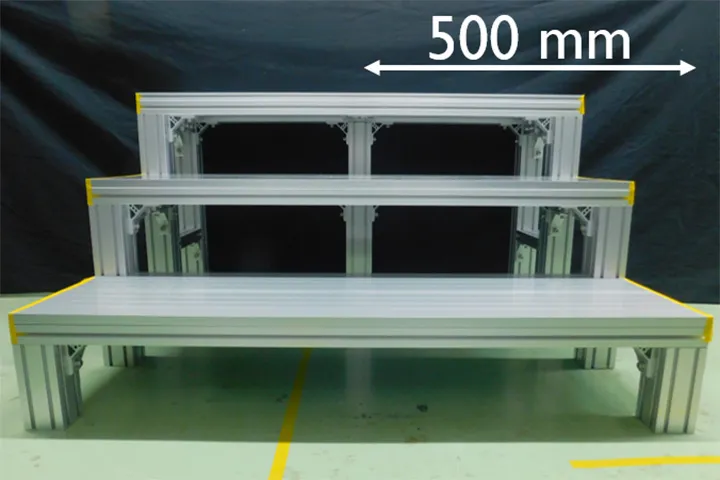
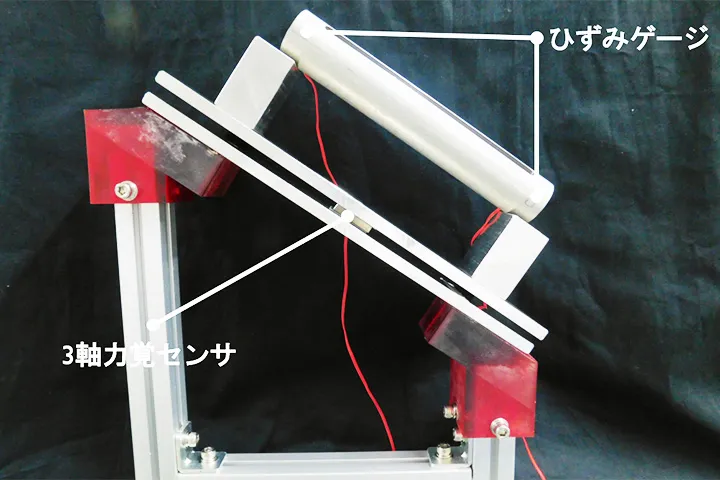
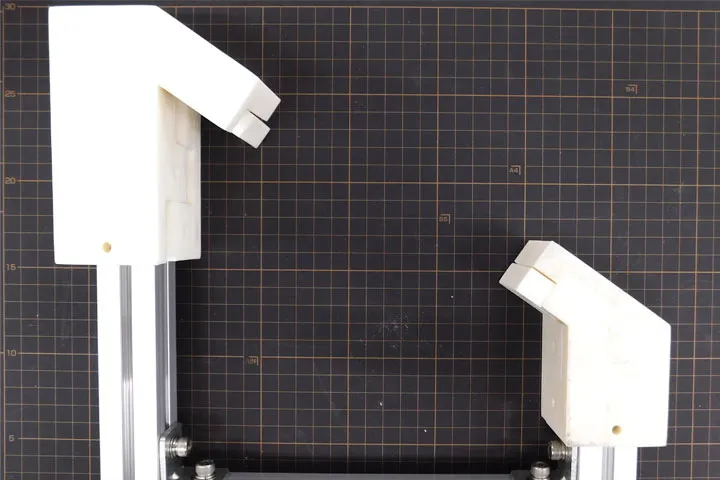
われわれの先行研究では、階段と手すりの位置関係からノイズ等により正確な握力の測定ができなかった。本研究では公共で使用される手すりを想定した実験環境の構築と、実験によって取得したデータから正味の握力を算出することを目的とする。
まず実験環境を構築し、検量線から校正式を導出し目的のシステムを構築した。実験データに校正式を適用した結果、すべてのデータで正味の握力を求めることができたが、一方で被験者の握力の何割が手すりに加わったのか明らかにするまでには至っていない。